pid的作用 pid是什么( 三 )
这样的乘坐体验就不是很好,这就需要我们设置一个合理的 P 值,车辆的反应不那么剧烈,反应时间你也能够接受 。
类似于你开汽车,你用 S 档(有的叫运动档,有的叫超车档)超车,较大的功率输出,较快的提速,然后切换到 D 档(行车档)维持;你可以感受一下,同样的油门,S 档与 D 档的反应不一样,P 值设置不一样 。
好了,既然有了 P 为什么还需要 D 呢?
人类的欲望是无止尽的,总希望越多越好,越快越好(前提是付出的越少越好) 。
这时就引入一个 D ,反应速度再快一点儿,但是反应又不那么剧烈;也就是在中等的 P 值前提下,比只有 P 的情况下更快的到达 100 的速度(用时更少),但是车辆又不剧烈的震荡(比没有 D 的时候更温和) 。
2. D——微分调节
为了不让车辆速度冲过头,我们再给他一个反向的减速度 。就是让车辆在越接近 100 的时候,车速解决 100 的速度越慢;与 100km/h 差距越大的时候,接近速度越快 。
注意,这个速度不是车辆的行驶速度,是达到目标速度 100 的时间长短 。
这点儿可能不太容易理解,这个相当于你车速已经到了 90km/h,为了防止过冲,这时候你开始松油门,松的比较快;当到达 95km/h 的时候,你油门松的就比较慢 。
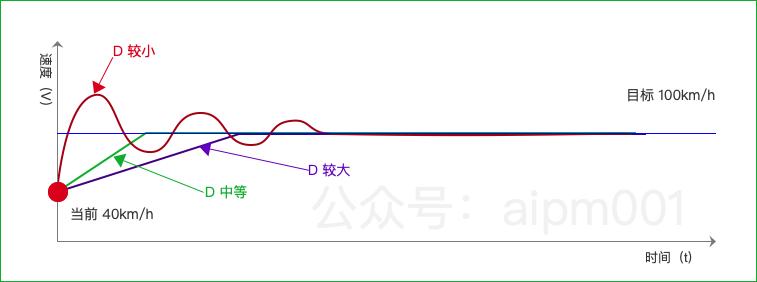
D 值的设置也有三种情况:
D 值较大,到达目标速度的时间就比较长;
D 值较小,会产生震荡,车速会在 100 上下波动,缓慢的进入 100 的车速维持;
D 值合适,车速较快达到 100,并且不会震动 。
直观的反应对比图:
文章插图
文章插图
P 值不变的前提下 D 值影响的变化表现 。
D 值太大了,减速度就大了,也可以理解为靠近目标速度 100 的阻力大 。那这样达到目标耗费的时间就较长 。
D 值太小了,虽然能够较快的达到目标,但是 D 值对 P 的影响力不够,容易过冲,并且需要经过多次调整才能进入稳定状态 。
在 P 和 D 的相互作用,调节控制下,最终得到的理想状态是这样的 。

文章插图
文章插图
既能在较快时间内达到目标,又不会使得反应剧烈造成不适感 。
有了 P 和 D 是不是很完美了呢?貌似很完美,但是我们希望更加完美就需要引入一个 I 进入 。
3. I——积分调节
有了 P 和 D 貌似已经很完美了,但是这个世界是不稳定的,没有一直保持不变的状态,正如那句话“一切都不在变化,唯一不变的只有变化” 。
你终于将你的车辆稳定在 100km/h 之后,但是依然有来个方面的影响因素,内在和外在 。
内在的是,你车辆的燃油效率是在变化的,外在的是风阻、路面状态(比如摩擦比、平整度、微小的坡度等)都在变化,这些干扰因素都在影响你车辆的恒定目标速度 。
所以,I (积分)就介入检测过去一段时间内车速状态,然后进行积分,适当的帮助 P 一把 。
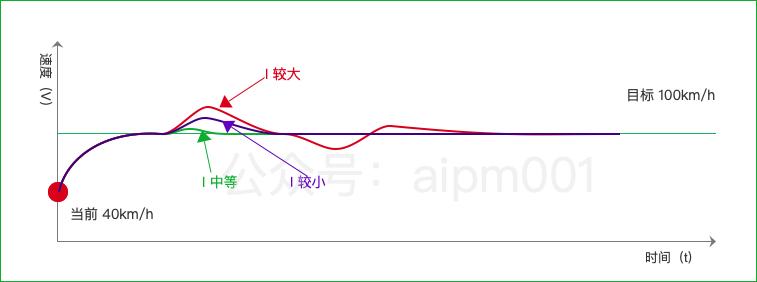
I 值设置也有三种情况:
I 值过大,调整的力度太大了,容易造成过冲,需要几次调整才能让车速回归正常,车辆会振荡;
I 值过小,调整的力度太小了,帮助 P 的作用不大,所以需要较长时间才能回到正常;
I 值合适,给一个合适的力来帮助 P ,让车速在一个合适的时间内回到目标值 。
直观的反应对比图:
文章插图
文章插图
推荐阅读









- {调取该文章的TAG关键词}|肯德基、喜茶供应商「宝立食品」要上市;文和友旗下茶饮品牌「MAMACHA」杭州首店开业;中国邮政进军咖啡领域|消研所周报
- 掏心窝|放弃iPhone13,入手华为P50 Pocket后的60天,说几点掏心窝的话
- 海外市场|凭借近2亿的年销量,小米三年超越苹果的可能性有多大?
- 手机|苹果玩的是什么把戏,华为市场份额减少,反而iPhone13价格下调了
- wind|在Android上跑Windows 11,只是一场美丽的误会
- 猎豹|全网都在夸的“猎豹”是什么?为何这些“黑科技”频频上热搜?
- pro14|开学倒计时,你的开学新装备选好了吗?这里有款笔记本电脑在召唤
- 一眼就爱上的微信头像!|头像| 微信
- 电竞版|敢于跟iPhone叫板!Redmi K50电竞版的底气究竟在哪里?
- excel|对比测试11代酷睿的华为旗舰笔电后,发现M1被神话了?