tof|索尼VISION-S不谈电池、续航,“肌肉”全在传感器上?( 二 )
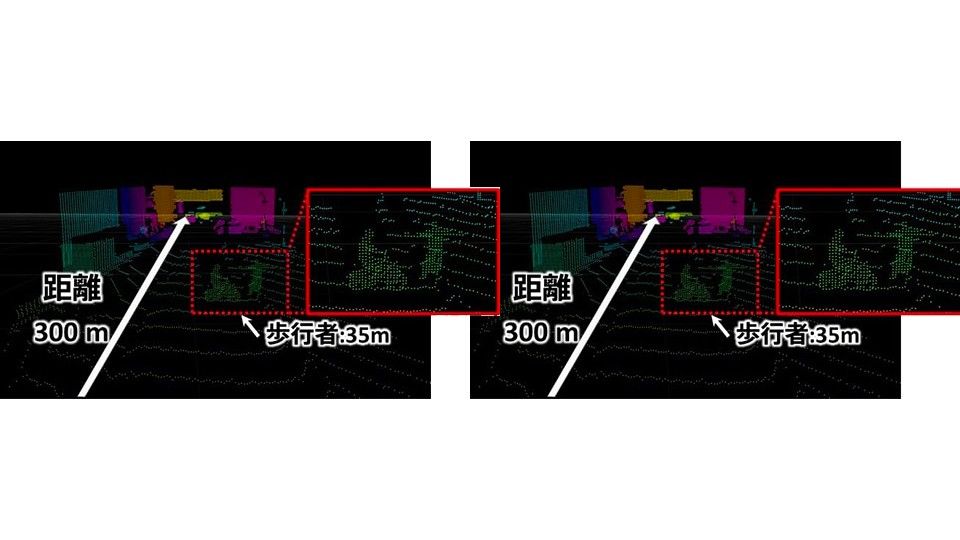
相比于传统激光类的传感器,索尼的IMX459传感器有两个优势,第一个是感光能力更强,相当于使用相同的激光发射器的情况下,SPAD能感知到更弱的光,而且感知距离也更远。最大测量距离300米,能以15厘米作为一个单位范围进行测量。第二个是计算距离的延迟更低,只用6纳秒,用到的技术是光子飞行时间(ToF)、被动淬灭。
文章插图
理解SPAD的感光逻辑,相机就是最好的例子。现在的数码相机的CMOS的像素呈现需要通过接受大量光子,感知到光线强度再控制光子进入的数量才能形成最终正确的曝光成像。应用到激光雷达上也一样,每个像素点都需要进入特定的波长和大量光子,最终形成激光雷达图像,距离的感知通过另一颗计算芯片来测距。
噪点能通过AI芯片做预处理,但实际根本的问题没有得到解决。但SPAD在接受的光子数量极少的情况下仍然能完成成像,也就意味着SPAD传感器具有非常高的信噪比。信噪比越高也就说明激光雷达最终成像更清晰、质量更高,从而提升的是车辆辅助驾驶上的安全性。
【 tof|索尼VISION-S不谈电池、续航,“肌肉”全在传感器上?】无论是SPAD还是ToF都是技术难点,那为什么又要把SPAD引入到ToF中?因为ToF需要检测出纳秒级的光信号,所以对光的要求非常高,所以在接收端索尼的激光雷达选择了SPAD(单光子雪崩二极管)来解决用光需求。此外,ToF 本身电路设计复杂,会占据更大的尺寸,SPAD作为ToF的关键技术,目前页只有意法半导体、索尼和英飞凌等公司在做。
传感器堆叠,解决响应速度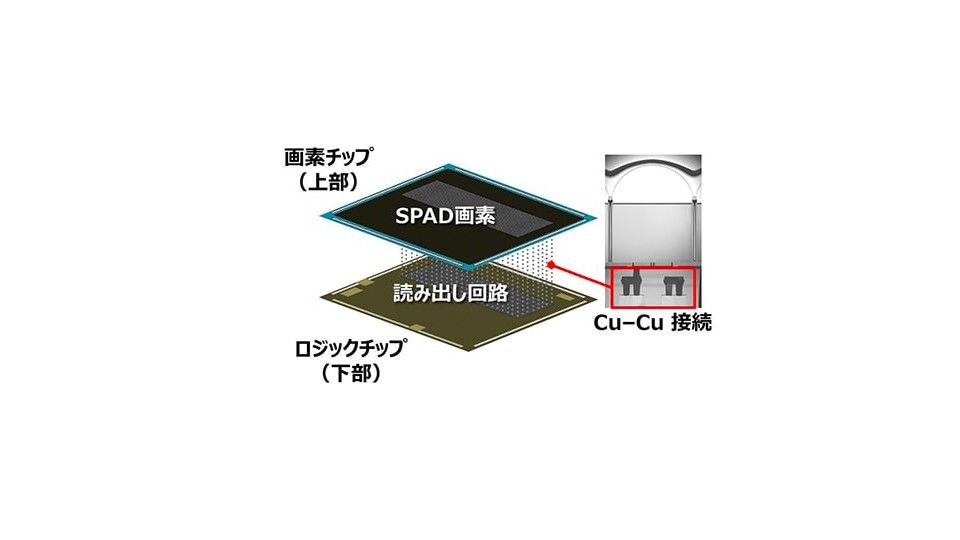
文章插图
所谓的传感器堆叠,其实是索尼打磨很久的“双层图像传感器堆叠”技术,除了能缩小体积之外,这项技术还能让感知响应速度变得更快。而这项技术,也是索尼之前利用在CMOS图像传感器开发中的技术,例如背照式像素结构、堆叠结构和Cu-Cu连接。
这样,就能成功构建一种将SPAD像素和测距处理电路封装在单个芯片的元器件架构。
关于这个传感器堆叠的技术路线,索尼做过一次较为详细的介绍。底层是逻辑电路,每个像素尺寸为10x10毫米,传感器表面也并非完全平整,每个像素点被做成一个凸透镜,这样就能实现更高的光折射率,从而提升激光的接受效果。
文章插图
根据索尼官方的测试数据来看,激光雷达传感器数据在905nm波长的光源条件下,检测效率能达到24%。而且由于每个SPAD像素都能和底层的逻辑电路链接,所以从感知到光子到转换成数字信号,整个过程只需要6纳秒,再匹配索尼开发的数字时间转换器省略了二次计算的时间。
索尼IMX459使用的ToF测距方式,能让SPAD捕捉到精确的时差、精确的深度分辨率,精确程度甚至能达到毫米级别。但唯一的弊端,就是ToF的测距方式感知距离短,在移动设备上只有5米左右的测距能力。5米的测距能力放到汽车上实现自动驾驶,确实不够用。
由于堆叠架构提升了效率,让SPAD技术得以弥补ToF的劣势,SPAD具有微弱光线也能成像的优势,而且依托于堆叠架构能有更好的传输速度,最慢的响应时间为7纳秒。以上的技术难点就在于传感器的堆叠架构,但好在索尼有之前做堆叠式CMOS的处理经验;另外,松下也正在研发堆叠式SPAD的ToF图像传感器。
总结索尼的IMX459在今年3月份才能推出样品,这项技术对于高级驾驶辅助系统(ADAS)的普及和自动驾驶(AD)的实现会有很大帮助。道路状况以及车辆和行人等物体的位置、形状会变得越来越复杂,所以目前除了摄像头和毫米波雷达等传感设备之外,我们更需要能高精度检测、识别、追踪的激光雷达。
推荐阅读












- 耳机|索尼LinkBuds体验:环境音让内外通透,开放式环形设计令人惊叹
- 耳屎|索尼刚发布的“甜甜圈”耳机,终于不堵耳屎了
- 音量|「有料评测」索尼全新开放式真无线LinkBuds评测:前所未有的更轻、更好听
- 腾讯|索尼发布 LinkBuds 开放式真无线耳机:全新外观设计,180 美元
- 售价|索尼LinkBuds耳机正式发布,售价1199元
- link|一款值得在生活中半永久的真无线耳机,索尼 LinkBuds评测
- 腾讯|索尼发布LinkBuds开放式真无线耳机,售价180美元
- buds|1199元!索尼LinkBuds耳机发布:音质比苹果好多了
- gen|努比亚Z40 Pro亮点多:首款35mm镜头和索尼IMX787,2月25日发布
- buds|索尼 LinkBuds 首发体验:环境音全开,对标 AirPods 的开放式耳机